Dijkstra's Shortest Path Algorithm (Cambridge (CIE) A Level Computer Science): Revision Note
Exam code: 9618

Dijkstra’s shortest path algorithm
In Computer Science, an optimisation problem involves finding the most efficient solution to a given problem
This could mean minimising cost, time, or resource usage, or maximising output, efficiency, or value
Examples of optimisation problems include:
Finding the shortest route between two locations (e.g. Google Maps)
Minimising resource usage in manufacturing or video games
Creating efficient timetables (e.g. for schools or offices)
Scheduling tasks and staff shifts to avoid conflicts or downtime
One of the most common real-world examples is finding the shortest path from A to B, which is exactly what Dijkstra’s algorithm solves
What is Dijkstra’s shortest path algorithm?
In A Level Computer Science, Dijkstra’s shortest path algorithm is a classic optimisation algorithm
It calculates the shortest path from a starting node to all other nodes in a weighted graph
It is often compared to breadth-first search, but Dijkstra’s includes edge weights and ensures the lowest total cost to reach each destination node
How It works:
The graph is made up of nodes (vertices) and edges (arcs)
Each edge has a weight, which can represent:
Time
Distance
Cost
The algorithm explores all possible routes, keeping track of the shortest known distance to each node
It guarantees the optimal path from the start node to every other node in the graph
For revision on graphs, see section 18 - AI & Graphs
An illustrated example of Dijkstra’s algorithm is shown below:
Performing Dijkstra's shortest path algorithm
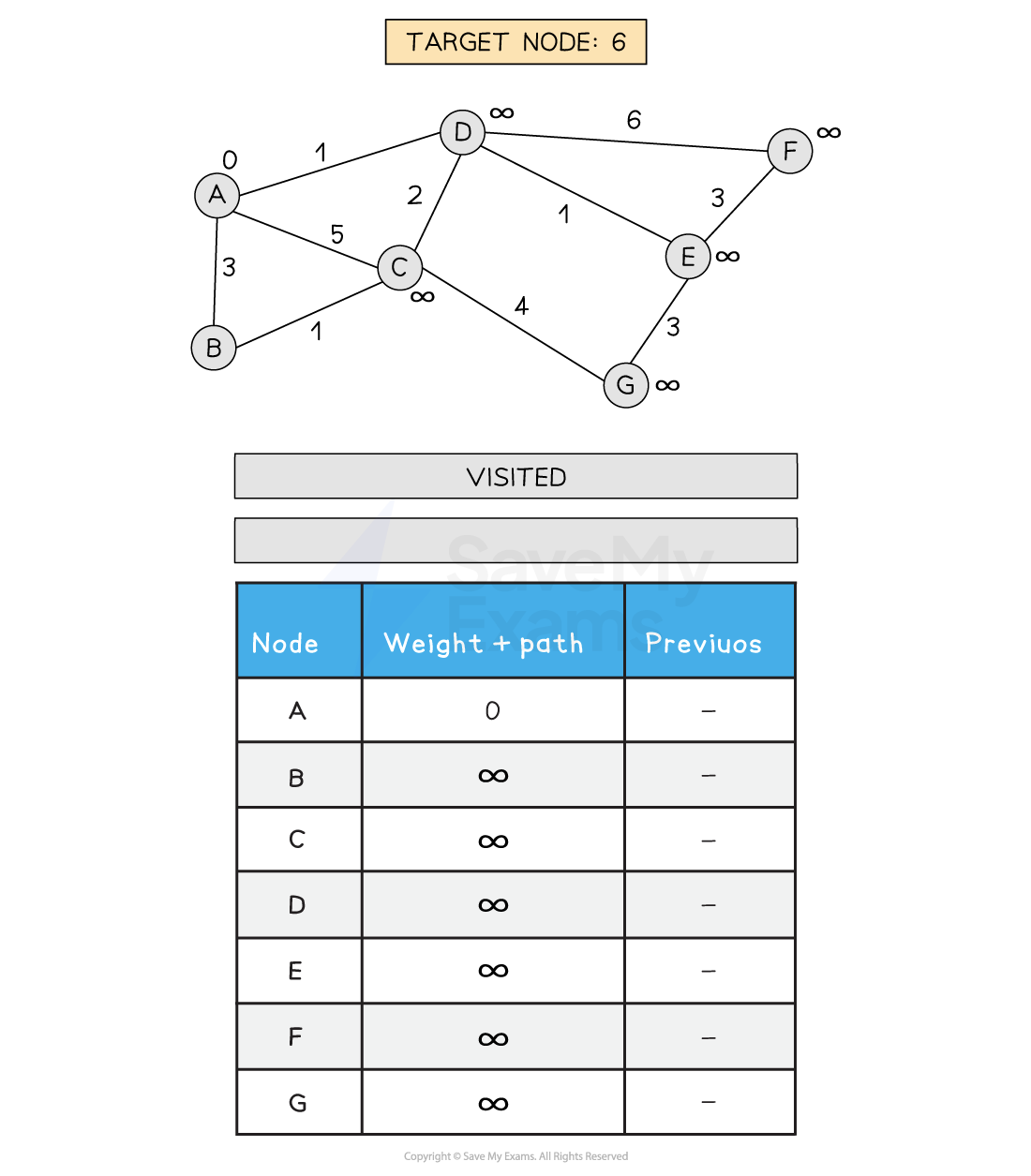
Set A path to 0 and all other path weights to infinity
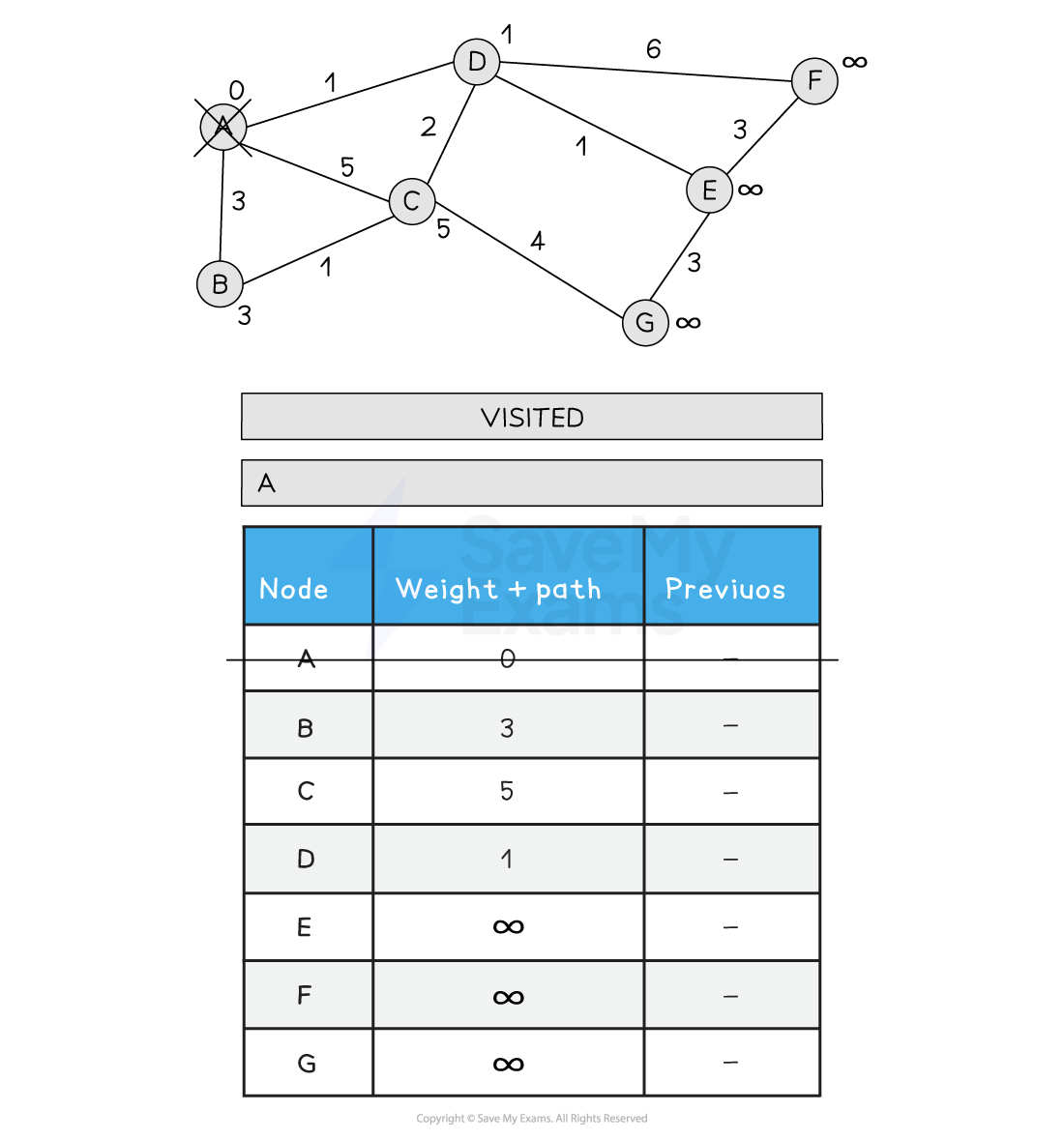
Visit A. Update all neighbouring nodes path weights to the distance from A + A's path weight (0)
Choose the next node to visit that has the lowest path weight (D)
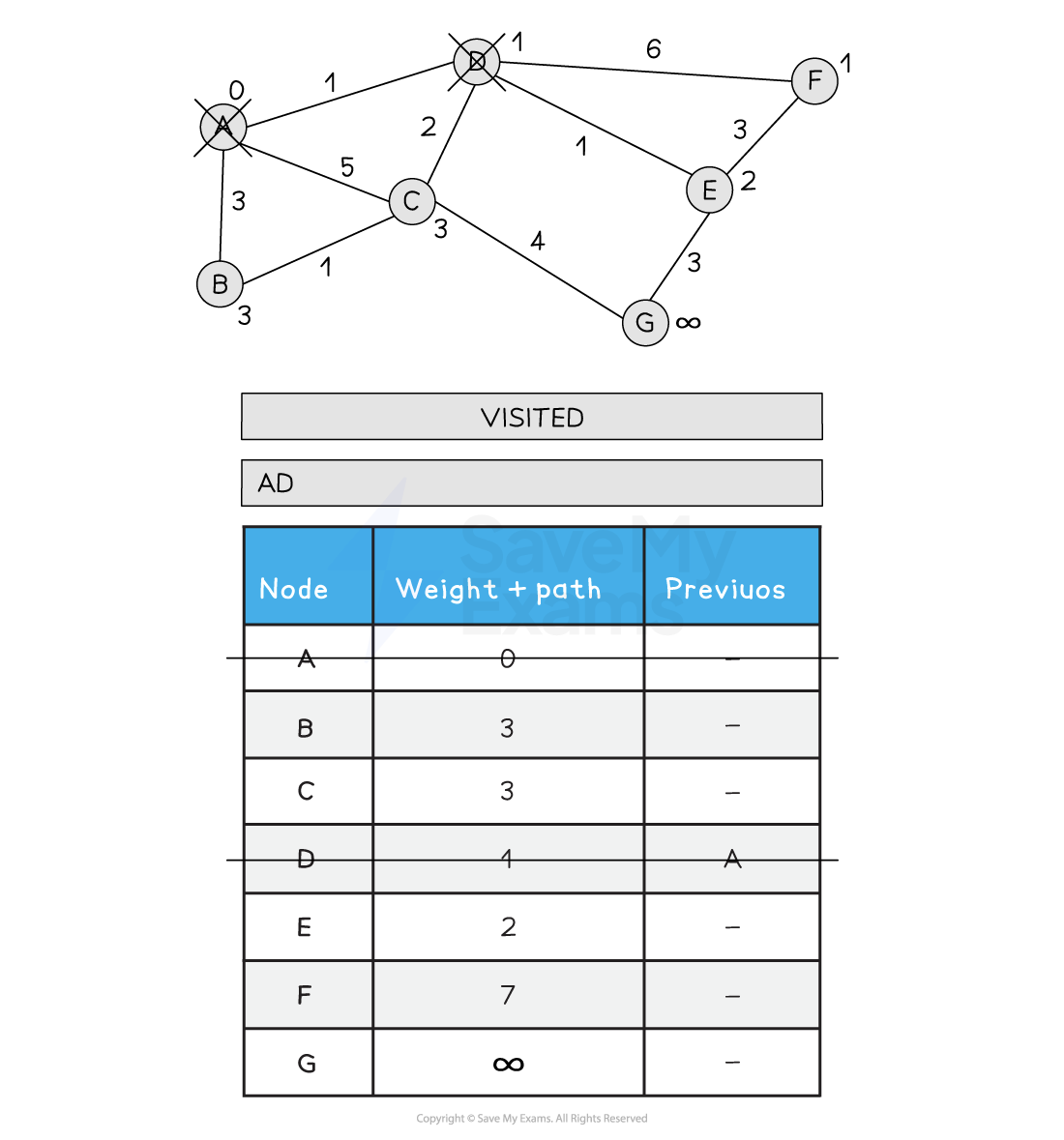
Visit D
Update all neighbouring, non-visited nodes with a new path weight if the old path weight is bigger than the new path weight
C is updated from 5 to 3 as the new path is shorted (A > D > C)
Choose the next node to visit that has the lowest path weight (E)
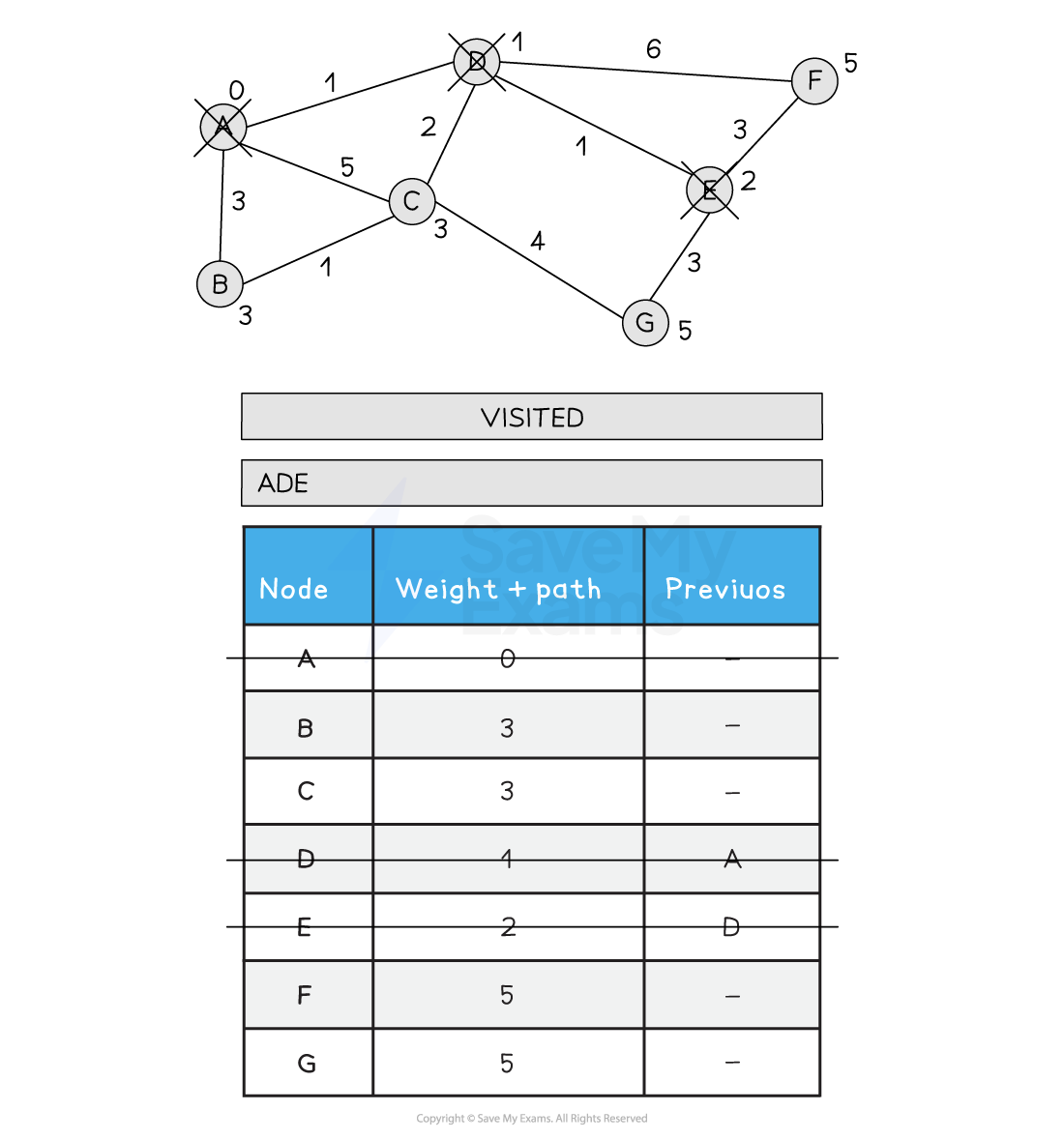
Visit E
Update all neighbouring, non-visited nodes from E with a new path weight
F is updated from 7 to 5 as the new path is shorter (A > D > E > F)
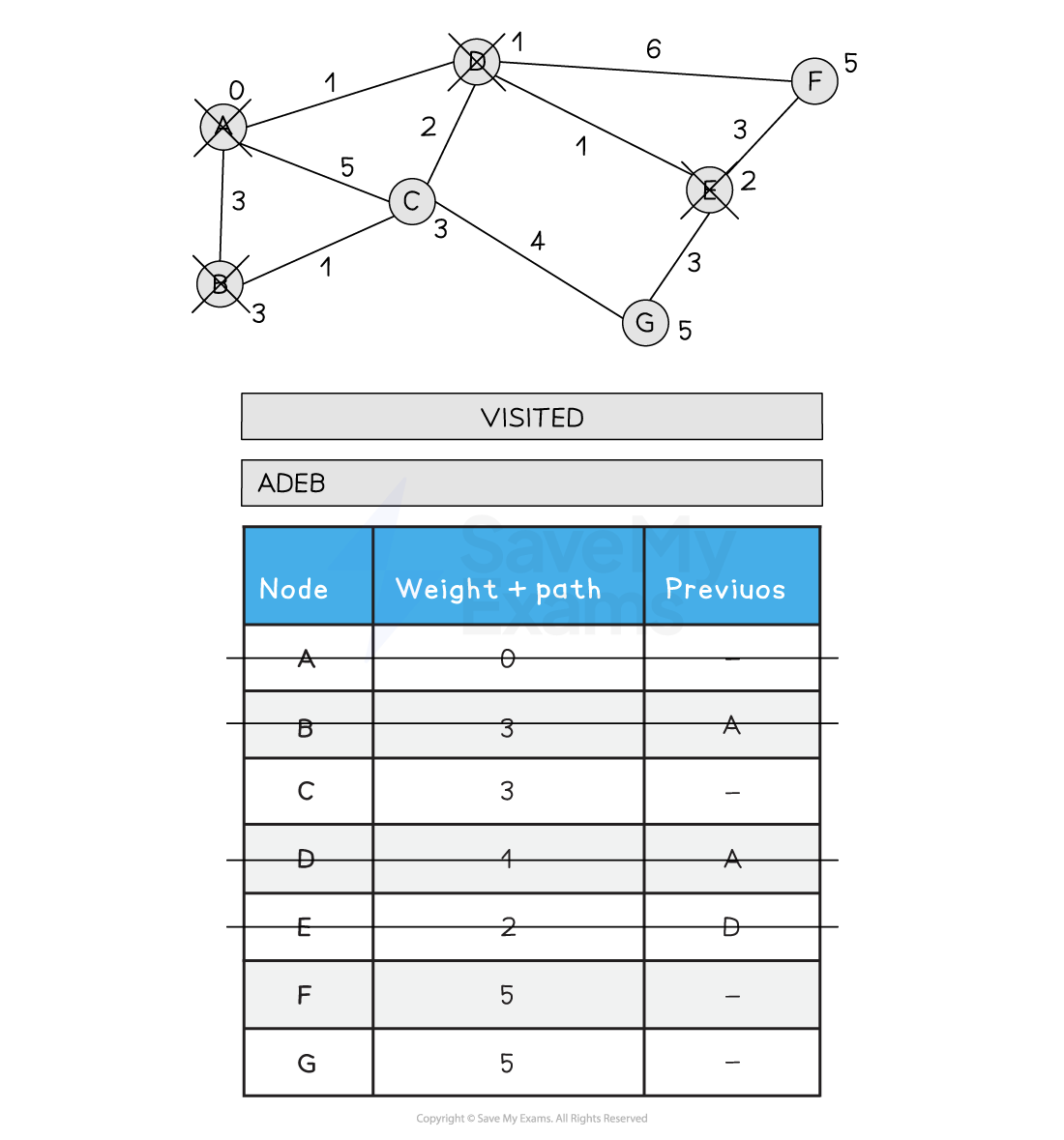
Choose the next node to visit, alphabetically (B)
Visit B
Update all neighbouring non-visited nodes from B with a new weight if the path is less than the current path
C is not updated as A > B > C is 4
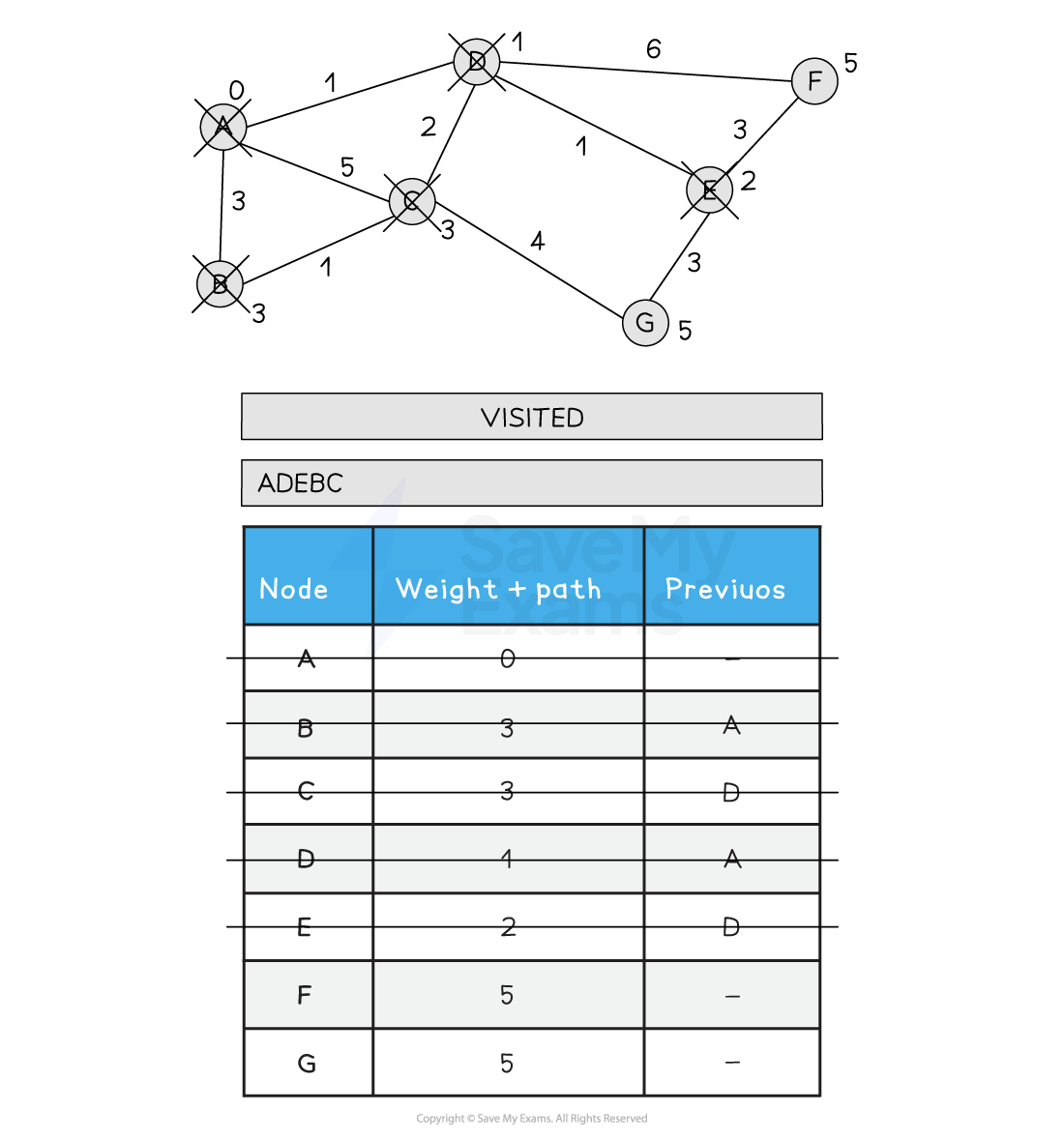
Choose the next lowest node and visit (C)
Update C's neighbours if the new path is shorter than the old path
A > D > C > G is 8, so G is not updated
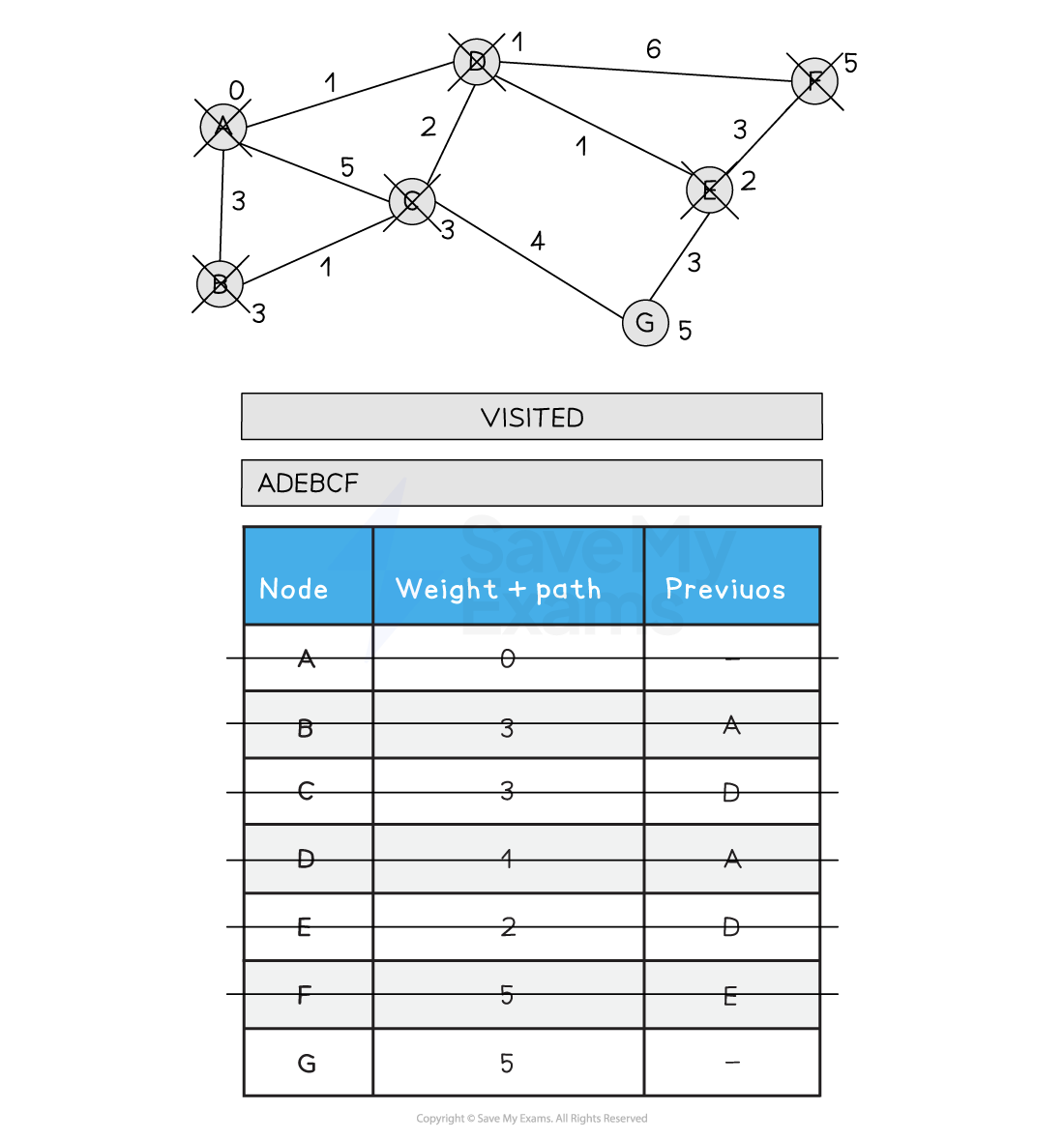
Choose the next lowest node and visit (F)
Update F's neighbours if the new path is shorter than the old path
F has no non-visited neighbours so no updates are made
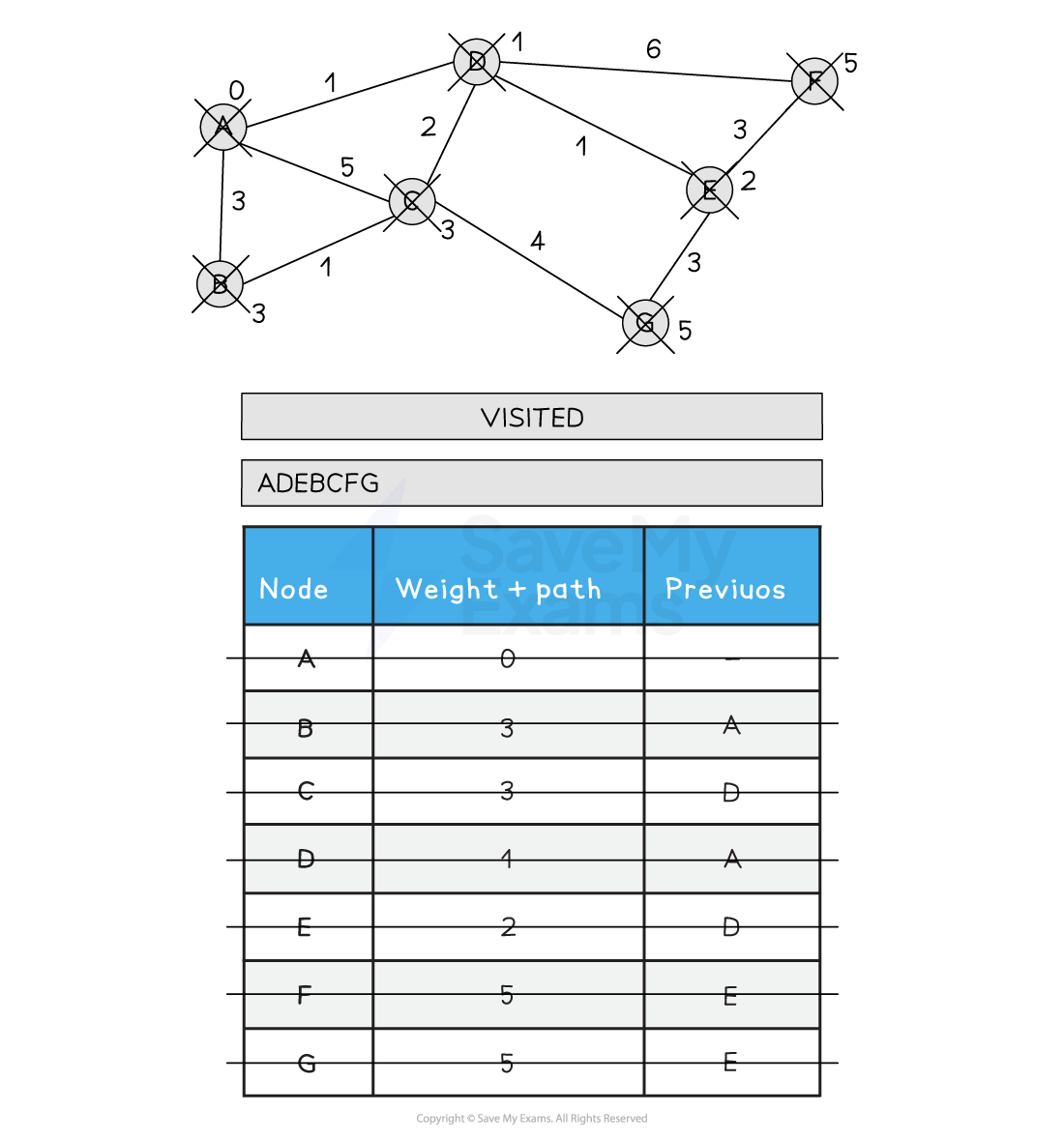
Choose the next lowest node and visit (G)
G has no non-visited neighbours so no updates are made
All nodes have been visited
Back tracking from G gives the following order and total distance A-D-E-G (5)
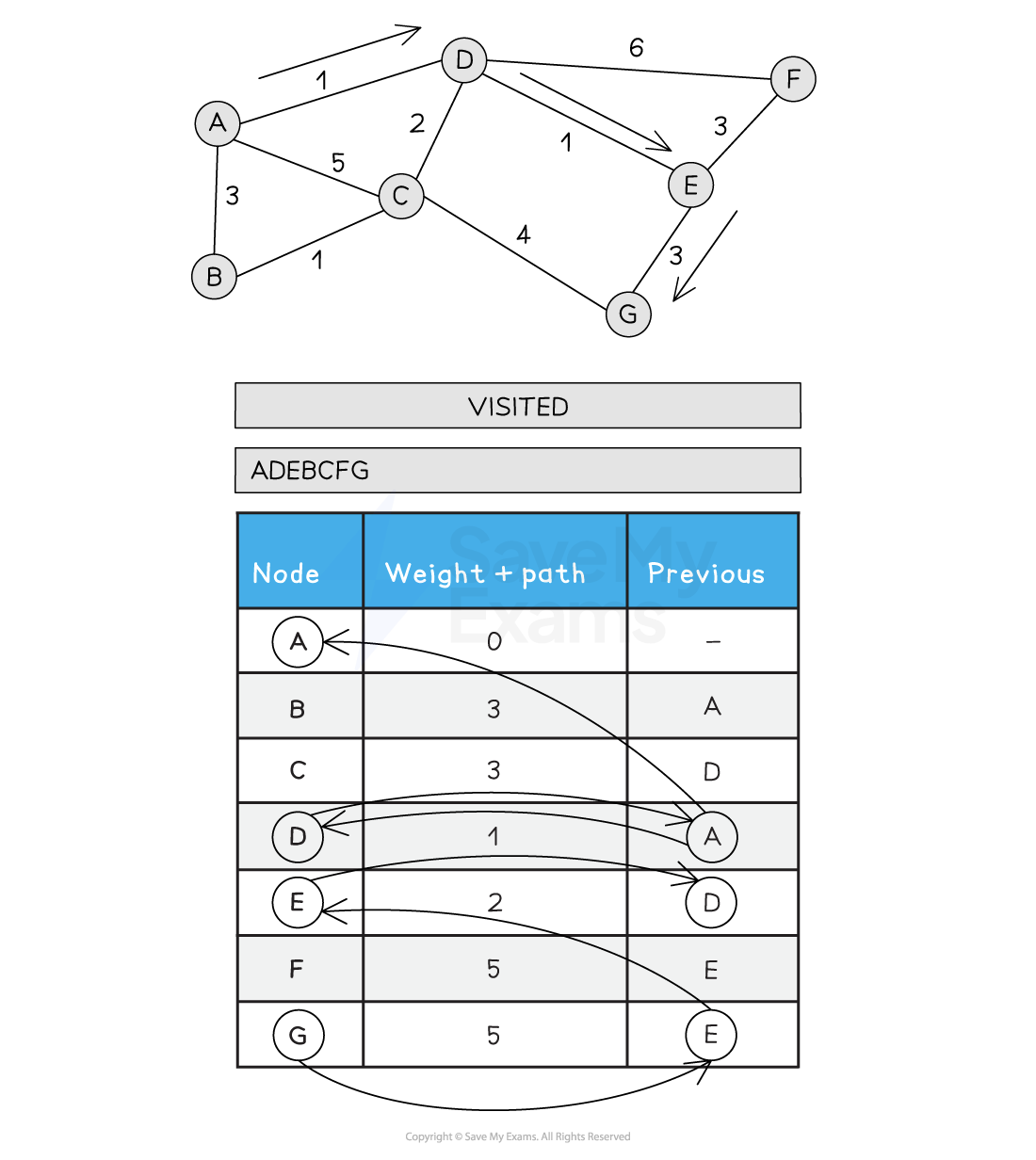
Figure 1: Performing Dijkstra’s Shortest path Algorithm
Programming Dijkstra's shortest path algorithm
How do you write Dijkstra's shortest path algorithm?
Pseudocode
FUNCTION Dijkstra(graph, start, goal)
// Initialise distances
FOR EACH node FROM graph
SET distance[node] TO infinity
NEXT node
SET distance[start] TO 0
DECLARE previousNode AS DICTIONARY
DECLARE visited AS LIST
DECLARE unvisited AS LIST
FOR EACH node FROM graph
ADD node TO unvisited
NEXT node
WHILE LENGTH(unvisited) > 0
// Find unvisited node with shortest distance
SET min TO null
FOR EACH node FROM unvisited
IF min = null THEN
SET min TO node
ELSEIF distance[node] < distance[min] THEN
SET min TO node
ENDIF
NEXT node
// Exit if goal reached
IF min = goal THEN
EXIT WHILE
ENDIF
// Update distances to neighbours
FOR EACH neighbour FROM graph[min]
SET cost TO weight(min, neighbour) // assume this function returns the edge weight
SET alt TO distance[min] + cost
IF alt < distance[neighbour] THEN
SET distance[neighbour] TO alt
SET previousNode[neighbour] TO min
ENDIF
NEXT neighbour
REMOVE min FROM unvisited
ADD min TO visited
ENDWHILE
// Build path from goal to start
DECLARE path AS LIST
SET node TO goal
WHILE node != start
ADD node TO path
SET node TO previousNode[node]
ENDWHILE
ADD start TO path
REVERSE path
RETURN path
ENDFUNCTIONAssumptions:
graph[node]returns a list of neighbour nodesweight(x, y)returns the edge weight between nodexandyLists like
visited,unvisited, andpathsupportADDandREMOVE
Python
def dijkstra(graph, start, goal):
# Initialise distances and previous node map
distance = {node: float('inf') for node in graph}
distance[start] = 0
previous_node = {}
visited = set()
unvisited = set(graph.keys())
while unvisited:
# Find the unvisited node with the smallest distance
min_node = None
for node in unvisited:
if min_node is None or distance[node] < distance[min_node]:
min_node = node
if min_node == goal:
break
for neighbour, weight in graph[min_node]:
if neighbour in visited:
continue
alt = distance[min_node] + weight
if alt < distance[neighbour]:
distance[neighbour] = alt
previous_node[neighbour] = min_node
visited.add(min_node)
unvisited.remove(min_node)
# Reconstruct path from goal to start
path = []
current = goal
while current != start:
path.append(current)
current = previous_node[current]
path.append(start)
path.reverse()
return pathExample usage:
# Graph format: adjacency list with weighted edges
graph = {
'A': [('B', 2), ('C', 5)],
'B': [('D', 1)],
'C': [('D', 2)],
'D': [('E', 3)],
'E': []
}
print(dijkstra(graph, 'A', 'E'))Output:
A list of nodes representing the shortest path from
'A'to'E'

Unlock more, it's free!
Join the 100,000+ Students that ❤️ Save My Exams
the (exam) results speak for themselves:

Was this revision note helpful?
